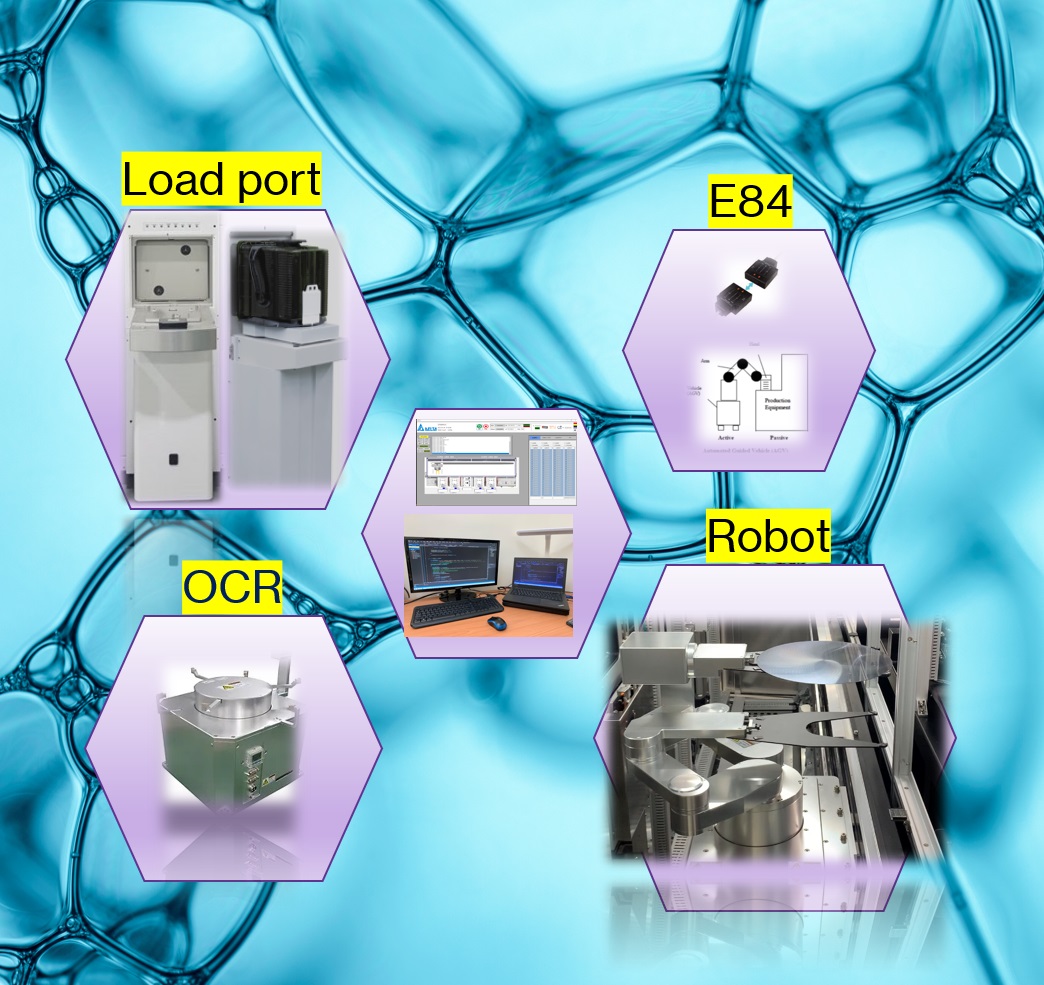
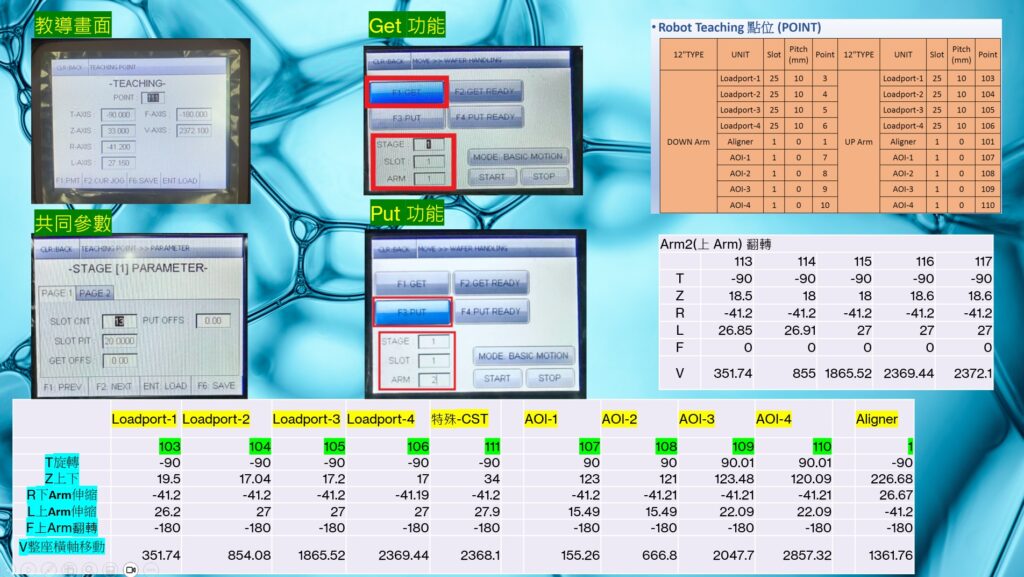
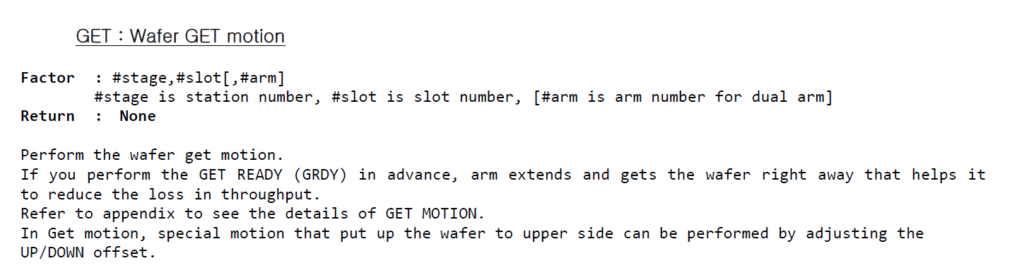
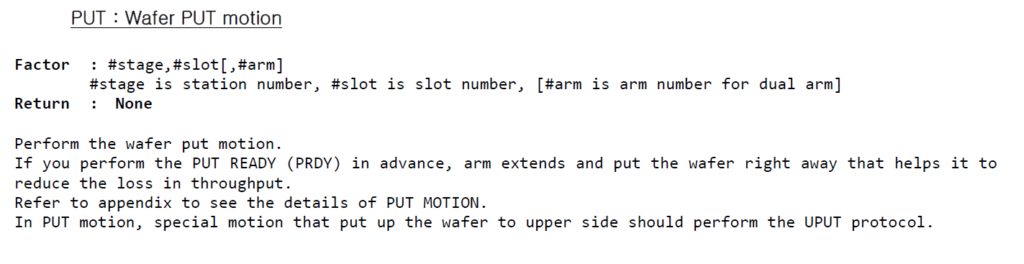
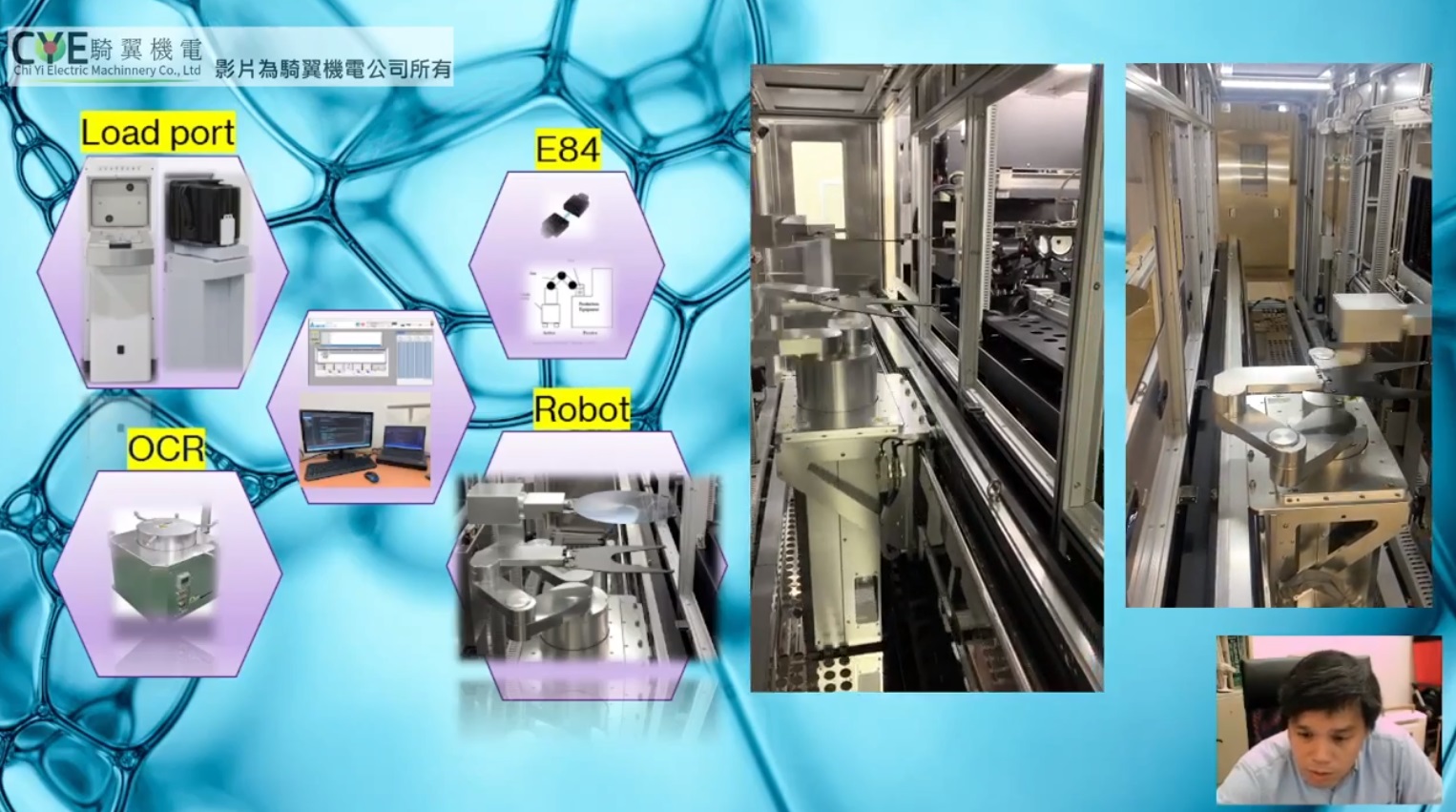
12" Wafer Robot 應用 機械手臂傳遞Wafer(EFEM )機械手臂傳遞 Wafer, Load-Port 搭配 OCR 與現場 AVG 車作 E84 的交握 Teach Box 準備工作 -- Home 側面開關切換至 ”TP” 位置手動模式,後方按鈕壓至第一段,用力壓下去則是第二段EMO確定 Robot 附近沒人在安全狀態下,按下 Teach Box 中上位置紅色 ORG 按鈕,執行原點復歸,等待回原點復歸完成。在主畫面按下 F3:SPEED 進入速度調整畫面,調整 JOG: 單動運行速度,設定 20% 或是更低,按下 F6 儲存設定回到主畫面,按下 F6 進入 JOG 畫面,每一軸的控制在 Teach Box 藍色按鈕位置,可以先熟悉一下方向再進行教點 Teach Box Key-In 座標技巧 參考右上方表格”點位範圍”,上 Arm 與 下 Arm 點位區塊 Robot 控制器都已定義好範圍Load port CST Wafer 位置,只要 Key-In 第一片座標,使用 Jog 移動到第一片位置,確定位置之後輸入再教導畫面,然後把 Jog 速度設定到更低,開始微調,都沒問題後使用 Teach Box Get 和 Put 的功能,作 CST 下、中、上 Wafer 位置的連續取放共同參數 Stage parameterSlot 層數 : 這是 CST 層數,通常是 25 層Slot Pitch : CST 每一層間隔Put、Get Offset : 取放片 Offset 移動量,依照Wafer厚度設定 Get wafer code Put wafer code Get Ready code 視頻說明連結 Share FacebookLINE
{kind=link}